
久违
一眨眼,2021已经过去了3个月了,也很久没有写写blog了。
兴许是懒了,兴许是工作后也没有那么多时间和经历去维护blog。总而言之,久违了。
2021,怎么说呢,总感觉时间过得越来越快,有点越来越抓不住的感觉。
工作上,算是平平淡淡吧,前大半年算是非常忙吧,毕竟处于高强度研发阶段,后半年搬到高唐之后,节奏稍微慢下来,会轻松一丢丢。技术上学到了更多高大上的知识,对大DAU项目的架构有了更清晰的认识和更近距离的了解。更加深入地学习了Python的各种知识,有一说一,Python对于业务来说,真的是神器啊,开发效率太杠杠了。
但是上帝打开一道门,就会关闭一扇窗。运行效率上就难顶了,唉,毕竟你都用python了,还在意什么运行效率?但是现实就是这么的魔幻。我们需要尽量兼顾两者,开发效率和运行效率,鱼与熊掌,二者均想兼得。
空闲时间,也用python搞了几个小玩意加深下技术。发现总喜欢捣鼓点小东西,但是要真正捣鼓小东西需要的时间和精力实在是有点多,加上工作又忙,渐渐地有点力不从心了。有时间想把一些小东西开下源,都懒得弄了。见识了公司泡泡和服务器的tb联动,于是也想搞搞,最终找到了飞书,不得不说,飞书也是很好用的一个东西,支持自定义消息,往指定的地址丢个数据,就能在手机端显示出来,以及接收手机端的输入,对于我的小玩意的监测实在是太好用了。以前写的小玩意,出了啥问题,只能是给邮箱地址发给邮件通知,实在是太麻烦了。打通了飞书的通知和交互逻辑之后,出了啥问题,都能反馈到飞书群上,同时还能直接输入指令给服务器接收,还是挺方便的。
生活上,也算是平平淡淡吧。老婆2020年6月左右换工作到了荔湾区,实在是说不想通勤太麻烦了,而且娃大部分时间也是老婆在带,只能是辛苦自己,于是搬到了荔湾区住。其实心里还是有点抵触的,毕竟之前我的通勤都控制在30min以内,一下子飙到了50min,实在是有点难顶。原本想法是2021把买房的事情定下来,但是从3月份开始看房一直看到年末,基本上广州的几个区都看过了,市区二手房老破小,300w以内的,基本上都是80m^2^,最低20年以上房龄的,说真的,想想花那么多钱,买这种居住体验,实在是难以下手。说什么以后还会涨,后面继续换房,在我看来,机会真的不大。想换房至少5年后,5年后,房龄就已经25年了,再想卖,想屁吃。为了给娃一个更好的学习环境?在我看来是个谬论,如果没有全方位的资源,特别是生活已经被房贷压住,怎么会有精力更好的养娃呢。其实我更希望地是有更多的时间陪伴,但是确实很多时候,我都在搞自己的东西,或者是在玩游戏,陪娃的时间确实是很少,这点也确实是经常被老婆和老妈埋怨。
中年男人,家庭地位实在是低。又要挣钱养家,又希望给更多时间给娃,又要每天忍受50min每趟的通勤,有时候实在是有点烦。搬到高唐之后,就直接自己开车去上班了,去班车那里实在是太远了,起码单趟要1h30min,想想就可怕。
一不小心,把电脑踹了一下,死机了。1660s的显卡只有一个HDMI接口,然而我的两个显示器都是HDMI的,只能是买了个DP转HDMI,只是那个转接头在主机背面如果不小心碰到就会死机,风扇死命地转,哎,只好重新调了下主机的位置,然后发现很干脆地,转接头貌似直接坏掉了,得勒,好走不送,直接入手一整条的转换线得了。
哎,又快00:30了,还没洗澡呢,明天还得早起搬砖,先不写了吧。
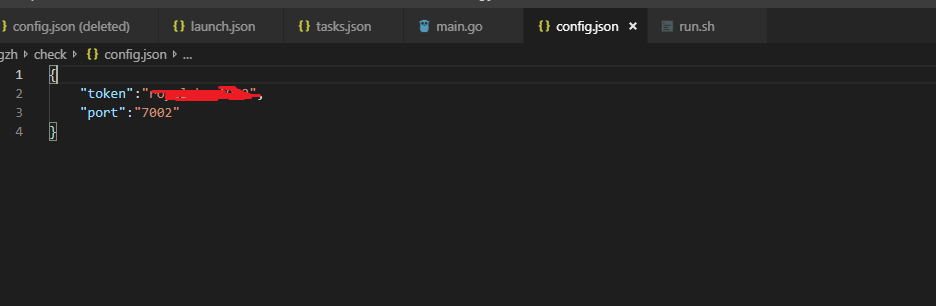
 port 则是你使用的监听接口,nginx反向代理到该端口。 运行时,输入 go run main.go config.json 即可
port 则是你使用的监听接口,nginx反向代理到该端口。 运行时,输入 go run main.go config.json 即可 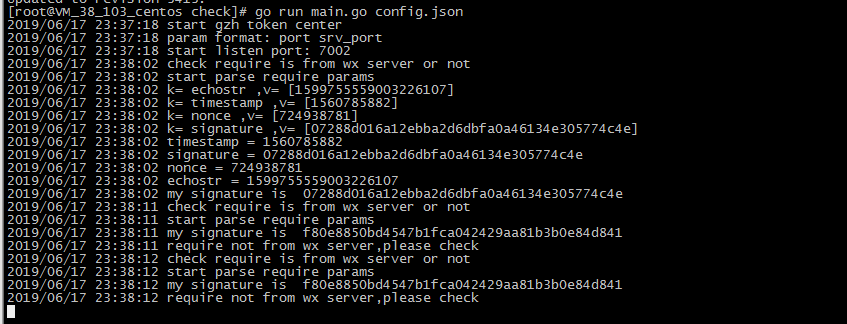 代码:
代码: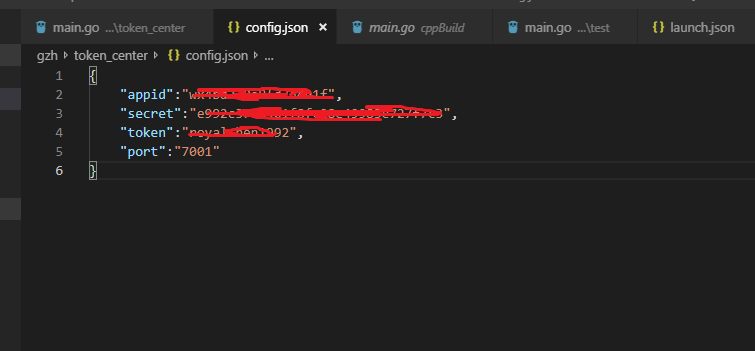
 运行时,输入 go run main.go config.json 即可
运行时,输入 go run main.go config.json 即可 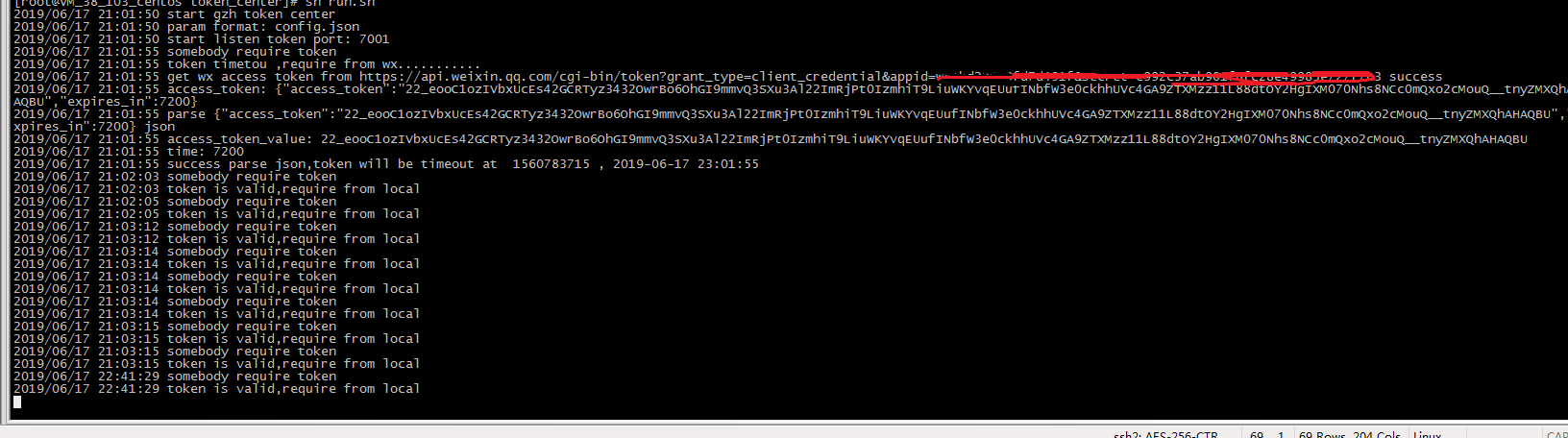 代码: main.go
代码: main.go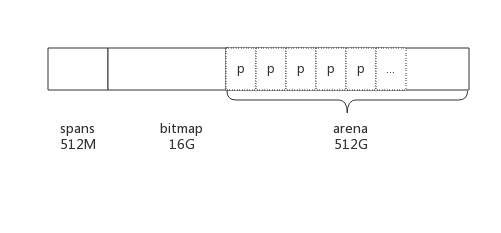
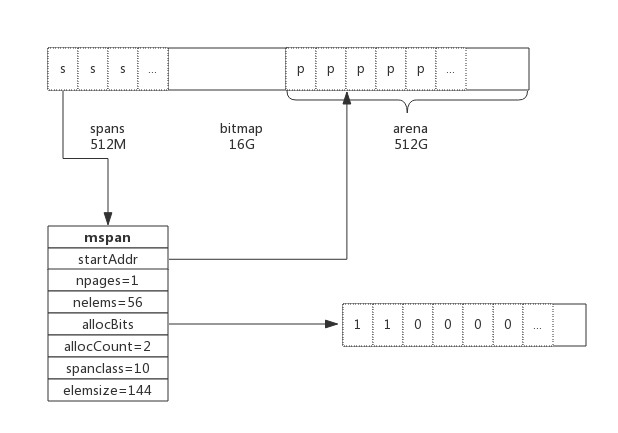 spanclass为10,参照class表可得出npages=1,nelems=56,elemsize为144。其中startAddr是在span初始化时就指定了某个页的地址。allocBits指向一个位图,每位代表一个块是否被分配,本例中有两个块已经被分配,其allocCount也为2。 next和prev用于将多个span链接起来,这有利于管理多个span,接下来会进行说明。
spanclass为10,参照class表可得出npages=1,nelems=56,elemsize为144。其中startAddr是在span初始化时就指定了某个页的地址。allocBits指向一个位图,每位代表一个块是否被分配,本例中有两个块已经被分配,其allocCount也为2。 next和prev用于将多个span链接起来,这有利于管理多个span,接下来会进行说明。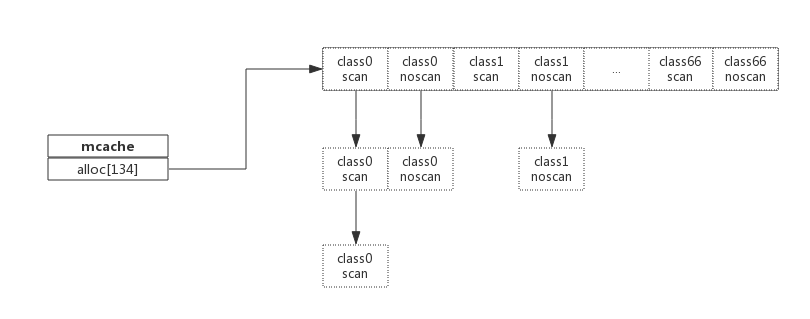 mchache在初始化时是没有任何span的,在使用过程中会动态的从central中获取并缓存下来,跟据使用情况,每种class的span个数也不相同。上图所示,class 0的span数比class1的要多,说明本线程中分配的小对象要多一些。
mchache在初始化时是没有任何span的,在使用过程中会动态的从central中获取并缓存下来,跟据使用情况,每种class的span个数也不相同。上图所示,class 0的span数比class1的要多,说明本线程中分配的小对象要多一些。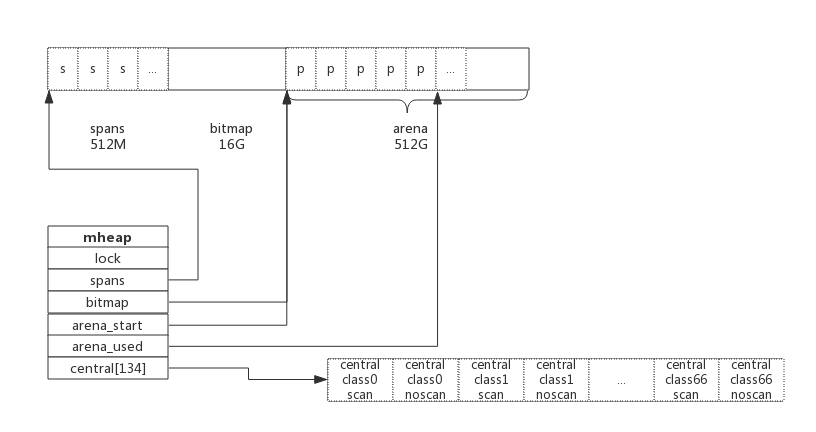 系统预分配的内存分为spans、bitmap、arean三个区域,通过mheap管理起来。接下来看内存分配过程。
系统预分配的内存分为spans、bitmap、arean三个区域,通过mheap管理起来。接下来看内存分配过程。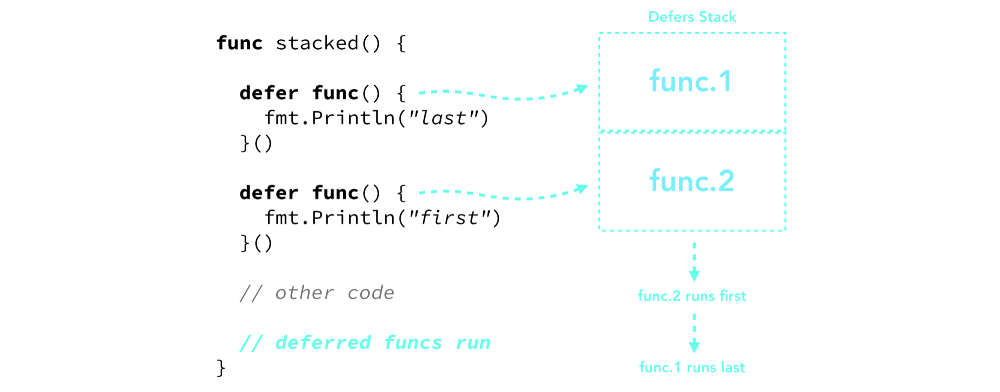
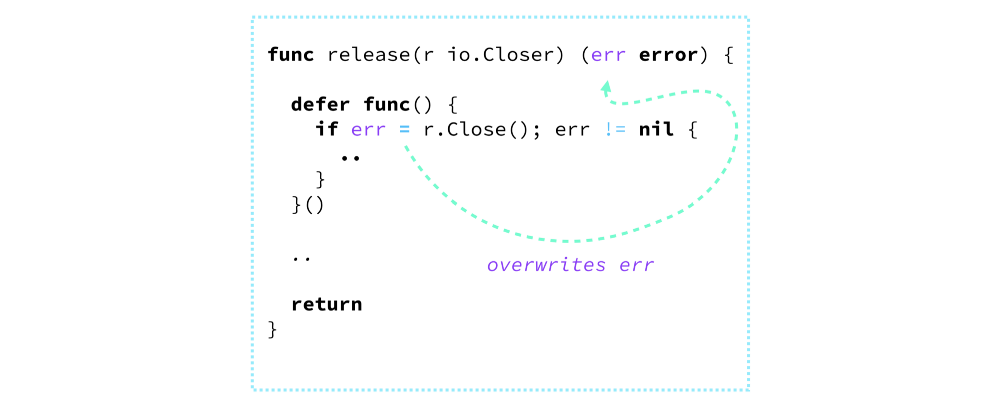 如果你对
如果你对 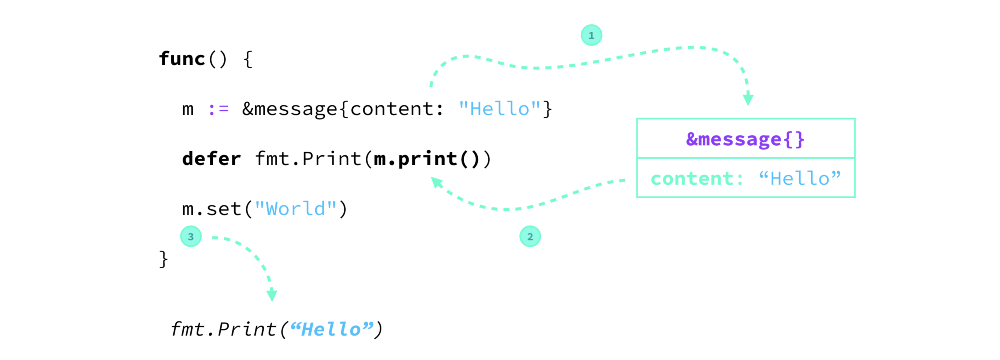 这个过程类似于调用
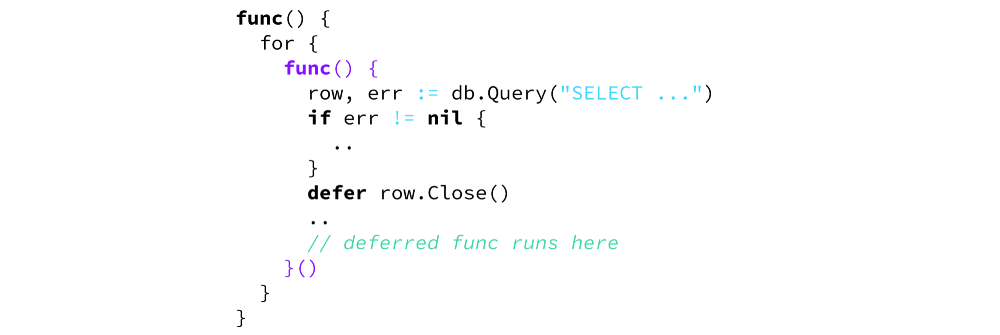
这个过程类似于调用  所有的延迟函数会查看相同的
所有的延迟函数会查看相同的  在上面的例子中,
在上面的例子中,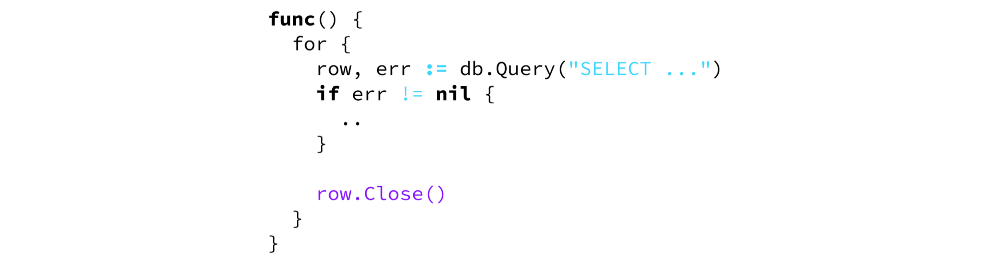
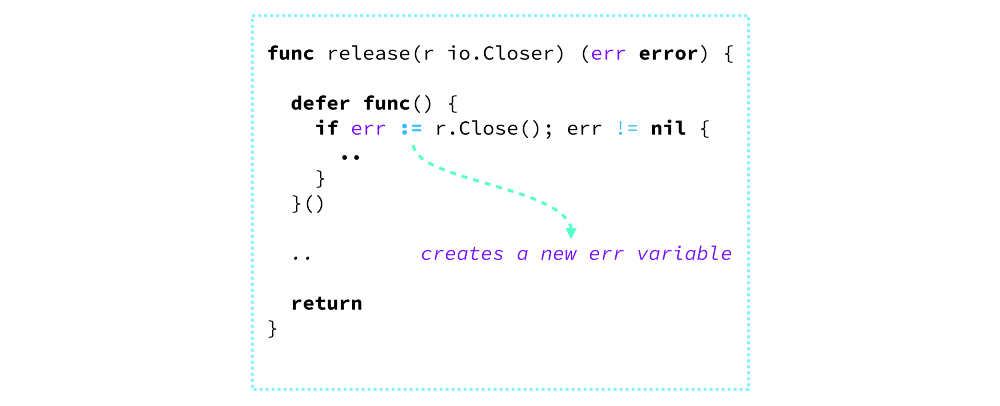
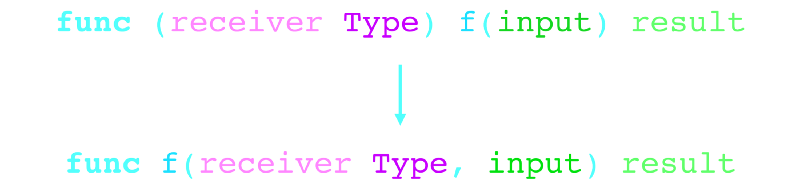 我们需要记住的是,当外围函数还没有返回的时候,Go 的运行时就会立刻将传递给延迟函数的参数保存起来。 因此,当一个以值作为接收者的方法被 defer 修饰时,接收者会在声明时被拷贝(在这个例子中那就是 Car 对象),此时任何对拷贝的修改都将不可见(例中的 Car.model ),因为,接收者也同时是输入的参数,当使用 defer 修饰时会立刻得出参数的值(也就是 “DeLorean DMC-12” )。 在另一种情况下,当被延迟调用时,接收者为指针对象,此时虽然会产生新的指针变量,但其指向的地址依然与上例中的 “c” 指针的地址相同。因此,任何修改都会完美地作用在同一个对象中。 以上就是本文的全部内容,我会在后续的文章中补充更多类似的坑 – 已经有至少 15 个易犯的 defer 错误榜上有名,如果你有任何想法,欢迎在下面留言。
我们需要记住的是,当外围函数还没有返回的时候,Go 的运行时就会立刻将传递给延迟函数的参数保存起来。 因此,当一个以值作为接收者的方法被 defer 修饰时,接收者会在声明时被拷贝(在这个例子中那就是 Car 对象),此时任何对拷贝的修改都将不可见(例中的 Car.model ),因为,接收者也同时是输入的参数,当使用 defer 修饰时会立刻得出参数的值(也就是 “DeLorean DMC-12” )。 在另一种情况下,当被延迟调用时,接收者为指针对象,此时虽然会产生新的指针变量,但其指向的地址依然与上例中的 “c” 指针的地址相同。因此,任何修改都会完美地作用在同一个对象中。 以上就是本文的全部内容,我会在后续的文章中补充更多类似的坑 – 已经有至少 15 个易犯的 defer 错误榜上有名,如果你有任何想法,欢迎在下面留言。